Looking back at the launch, I made a few observations:
#1. Balloon’s flight path was very close to HABHUB prediction:
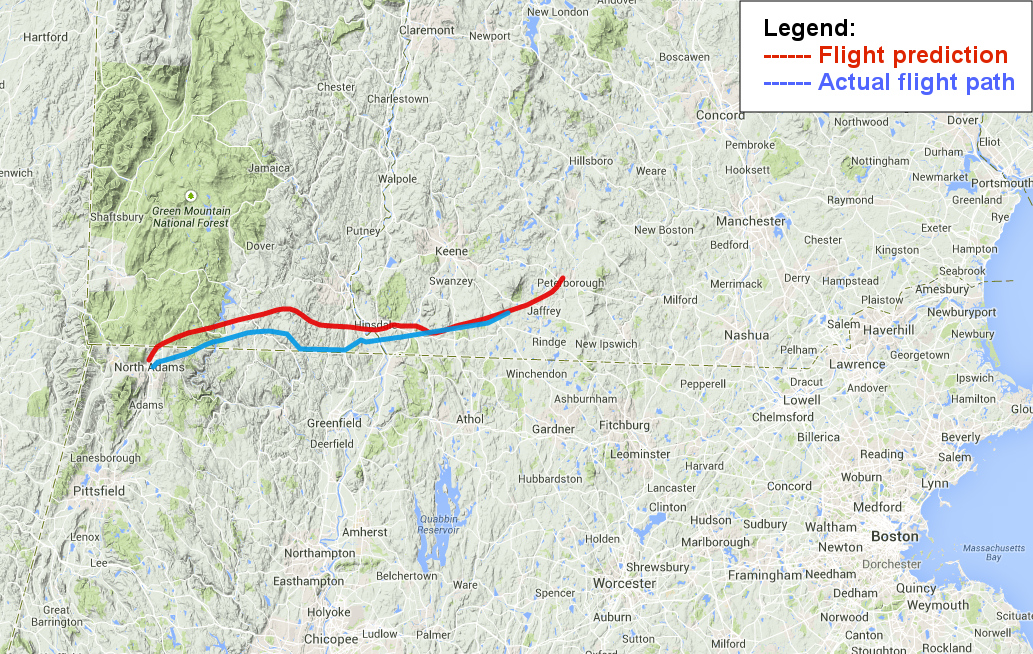
Balloon flight path – prediction vs actual
#2. Despite locking camera’s focus to infinity in my CHDK script, focus locked somewhere else. Ouch!
Canon A1100is offers little manual controls, and unfortunately even CHDK can not provide reliable overrides. I’ll be replacing the camera in the next launch.
#3. My interface between Yaesu transceiver and iPhone with PocketPacket app worked unreliably. But, Baofeng radio paired with Nexus 5 and APRSdroid worked like magic. It picked APRS signal half a mile from payload’s landing location.